

 Back to Blog
Back to Blog1. Applicable products
- Series 1520 Thrust Stand
- Series 1580 Test Stand
- Series 1585 Test Stand
- Series 1780 Test Stand
2. What describes your problem?
Please find within the following table which describes your problem. Once selected, mark down the troubleshooting points to follow.

3. Problem specific troubleshooting
3.1 Can I stream my measurement data to any 3rd-party softwares such as Matlab, ROS, Raspberry Pi?
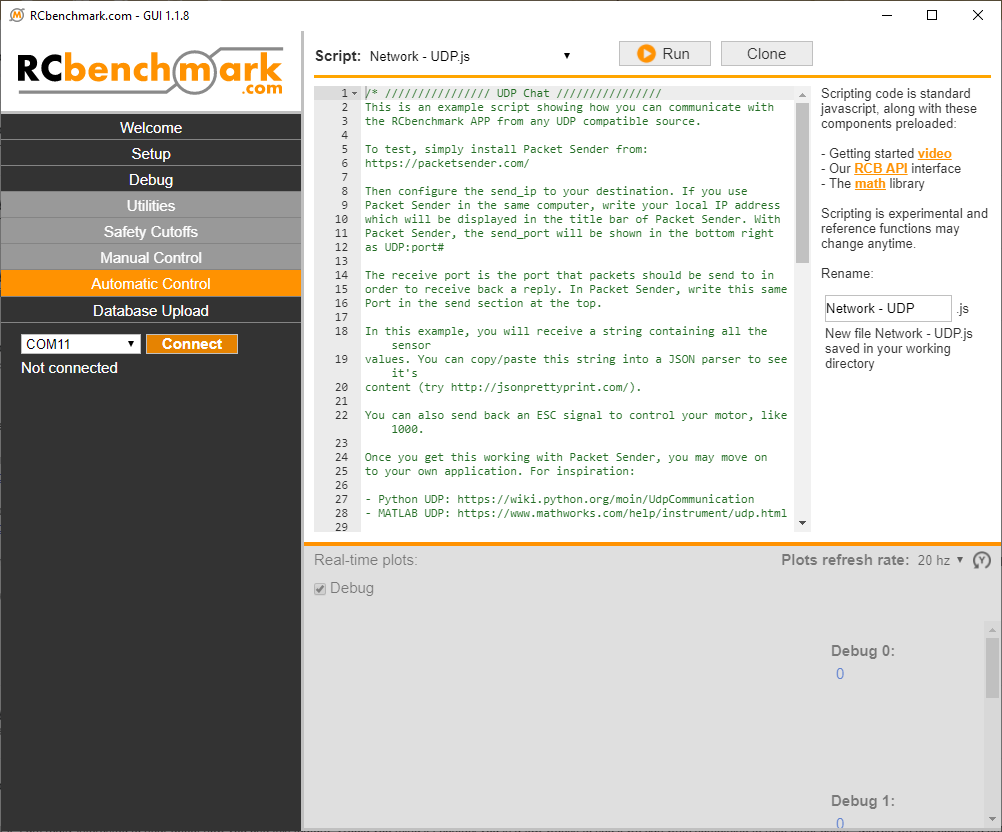
It is possible to communicate with external software using UDP network communication, but you will need to write your own communication protocol. In some cases, we may be able to help you write what you need under a programming contract. If you want to try, go to the “Automatic Control” tab of our software, and go to the script called “Network-UDP”. There is an example script to get you started with UDP communication:
Additional resources:
- UPD communication in Python:
https://wiki.python.org/moin/UdpCommunication - Our script API, and the documentation for our UDP functions:
https://api.rcbenchmark.com/rcbgui/v11/rcb.udp.html - An external YouTube reviewer who used the UDP feature to control the board from an external Python script (starts at 11 minutes):
https://youtu.be/w8TiUt7__vU?t=704
3.2 Can I use ChromeOS to control the stand?
No, the RCbenchmark software only supports Windows. You may download it here:
https://www.tytorobotics.com/blogs/manuals-and-datasheets/rcbenchmark-software-overview
4. Problems persist?
We support all issues related to the measurement tools itself, and we can provide limited support regarding your test setup and power-train selection. If you need extended support for your specific tests, manufacturing facility or UAV, contact us at [email protected]. We offer extended support contracts including phone and video conference at affordable rates.
To obtain a solution to your problem faster, please indicate which troubleshooting steps you have already done. Also, include the debug log from the software. If relevant, please also include screenshot or pictures of the issue.